- 您现在的位置:买卖IC网 > Sheet目录311 > AS5040 PB (ams)BOARD PROGRAM AS5040
�� �
�
�AS5040�
�Data� Sheet�
�Table� 5:� PWM� Signal� Parameters�
�Parameter�
�PWM� frequency�
�MIN� pulse� width�
�MAX� pulse� width�
�Symbol�
�f� PWM�
�PW� MIN�
�PW� MAX�
�Typ�
�0.9756�
�1�
�1024�
�Unit�
�kHz�
�μs�
�μs�
�Signal� period:� 1025μs�
�-� Position� 0d�
�-� Angle� 0� deg�
�-� Position� 1023d�
�-� Angle� 359,65� deg�
�Note�
�10� Analog� Output�
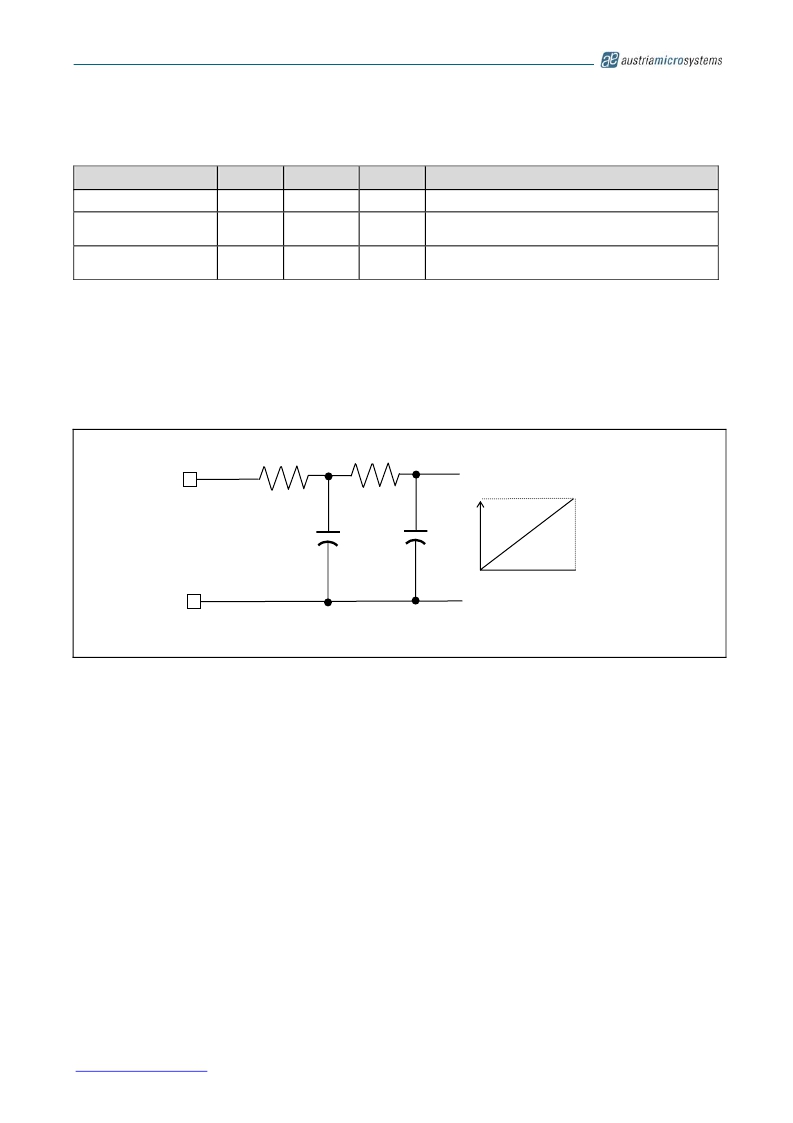
�An� analog� output� may� be� generated� by� averaging� the� PWM� signal,� using� an� external� active� or� passive� lowpass� filter.�
�The� analog� output� voltage� is� proportional� to� the� angle:� 0°=� 0V;� 360°� =� VDD5V.�
�Using� this� method,� the� AS5040� can� be� used� as� direct� replacement� of� potentiometers.�
�Figure� 11:� Simple� Passive� 2� nd� Order� Lowpass� Filter�
�Pin12�
�R1�
�R2�
�analog� out�
�PWM�
�C1�
�C2�
�VDD� 2�
�R1,R2� ≥� 4k7�
�Pin7�
�VSS�
�C1,C2� ≥� 1μF� /� 6V�
�0V� 2�
�0°�
�360°�
�R1� should� be� ≥� 4k7� to� avoid� loading� of� the� PWM� output.� Larger� values� of� Rx� and� Cx� will� provide� better� filtering� and�
�less� ripple,� but� will� also� slow� down� the� response� time.�
�11� Brushless� DC� Motor� Commutation� Mode�
�Brushless� DC� motors� require� angular� information� for� stator� commutation.� The� AS5040� provides� U-V-W� commutation�
�signals� for� one� and� two� pole� pair� motors.� In� addition� to� the� three-phase� output� signals,� the� step� (LSB)� output� at� pin� 12�
�allows� high� accuracy� speed� measurement.� Two� resolutions� (9� or� 10� bit)� can� be� selected� by� programming� Div0�
�according� to� Table� 6.�
�Mode� 3.0� (3.1)� is� used� for� brush-less� DC� motors� with� one-pole� pair� rotors.� The� three� phases� (U,� V,� W)� are� 120�
�degrees� apart,� each� phase� is� 180� degrees� on� and� 180� degrees� off.�
�Mode� 3.2� (3.3)� is� used� for� motors� with� two� pole� pairs� requiring� a� higher� pulse� count� to� ensure� a� proper� current�
�commutation.� In� this� case� the� pulse� width� is� 256� positions,� equal� to� 90� degrees.�
�The� precise� physical� angle� at� which� the� U,� V� and� W� signals� change� state� (“Angle”� in� Figure� 12� and� Figure� 13)� is�
�calculated� by� multiplying� each� transition� position� by� the� angular� value� of� 1� count:�
�Angle� [deg]� =� Position� x� (360� degree� /� 1024)�
�www.austriamicrosystems.com�
�Revision� 2.10�
�15� -� 33�
�发布紧急采购,3分钟左右您将得到回复。
相关PDF资料
AS5043 PB
BOARD PROGRAM AS5043
AS5045 PB
BOARD PROGRAM AS5045
AS5134 PB
BOARD PROGRAM AS5134
AS5140 PB
BOARD PROGRAM AS5140
ASDMB-ADAPTER-KIT
ASDMB MEMSPEED P II OSC KIT
ASFLMPLP-ADAPTER-KIT
ASFLMPLP MEMSPEED P II OSC KIT
AT24C01-10SI-1.8
IC EEPROM 1KBIT 400KHZ 8SOIC
AT24C01B-TSU-T
IC EEPROM 1KBIT 1MHZ SOT23-5
相关代理商/技术参数
AS5040_09
制造商:AMSCO 制造商全称:austriamicrosystems AG 功能描述:10Bit 360 Programmable Magnetic Rotary Encoder
AS5040_1
制造商:AMSCO 制造商全称:austriamicrosystems AG 功能描述:10Bit 360 Programmable Magnetic Rotary Encoder
AS5040-AB
功能描述:插座和适配器 AS5040 Adapter Board RoHS:否 制造商:Silicon Labs 产品:Adapter 用于:EM35x
AS5040-ASSM
功能描述:AS5040-ASSM SSOP16 LF T&RDP 制造商:ams 系列:- 零件状态:在售 编码器类型:磁性 输出类型:PWM 每转脉冲数:512 电压 - 电源:4.5 V ~ 5.5 V 致动器类型:外磁铁,不含 棘爪:无 内置开关:无 安装类型:表面贴装 朝向:- 端子类型:表面安装(SMD,SMT) 旋转寿命(最少次数):- 标准包装:500
as5040asst
制造商:ams 功能描述:T&R / SSOP 16
AS5040-ASST
功能描述:板机接口霍耳效应/磁性传感器 10Bit Rotary Sensor w/Digital Interface RoHS:否 制造商:Honeywell 类型:Bipolar Hall-Effect Digital Position Sensor 工作电源电压:3 V to 24 V 电源电流:3.5 mA 最大输出电流:20 mA 工作点最小值/最大值:5 G, 55 G 最小/最大释放点(Brp):- 55 G, - 5 G 最大工作温度:+ 150 C 安装风格:SMD/SMT 封装 / 箱体:SOT-23
AS5040ASSU
制造商:AMS 功能描述:IC MAGNETIC ROTARY ENCODER 10BIT SSOP16 制造商:AMS 功能描述:IC, MAGNETIC ROTARY ENCODER 10BIT SSOP16 制造商:AMS 功能描述:IC, MAGNETIC ROTARY ENCODER 10BIT SSOP16; IC Function:Encoder IC; Brief Features:360 Contactless High Resolution Angular Position Encoding, Two 10-bit Absolute Output; Supply Voltage Min:3V; Supply Voltage Max:3.6V; No. of Pins:16 ;RoHS Compliant: Yes
AS5040-ASSU
功能描述:板机接口霍耳效应/磁性传感器 10Bit Rotary Sensor w/Digital Interface RoHS:否 制造商:Honeywell 类型:Bipolar Hall-Effect Digital Position Sensor 工作电源电压:3 V to 24 V 电源电流:3.5 mA 最大输出电流:20 mA 工作点最小值/最大值:5 G, 55 G 最小/最大释放点(Brp):- 55 G, - 5 G 最大工作温度:+ 150 C 安装风格:SMD/SMT 封装 / 箱体:SOT-23